
Experimental investigation of dynamic stall control on a rotor airfoil using unsteady dielectric barrier discharge
-
摘要:
针对动态失速导致旋翼翼型气动性能恶化的问题,借助介质阻挡放电非对称构型激励器,通过脉动压力传感器测量,开展了旋翼翼型动态失速非定常等离子体流动控制研究。重点对非定常等离子体控制机理和非定常激励参数影响进行了探究,试验验证了非定常等离子体激励的良好控制能力。研究表明:非定常流动控制可以减弱翼型的升力骤降,20%的占空比就足以取得明显的控制效果;激励频率F+ = 1~2时的非定常控制效果最好,升力迟滞环面积减小16%,升力系数平均值提高6%。机理分析发现等离子体激励主要作用于动态失速涡脱落后,非定常激励明显削弱了动态失速涡脱落对翼型气动力的不利影响,同时非定常激励可以产生更多的涡以促进前缘逆压梯度的恢复和流动的重附着。
Abstract:To address the issue of rotor airfoil aerodynamic performance degradation due to dynamic stall, we conduct experimental investigations utilizing pulsating pressure sensors and asymmetric configuration actuators with dielectric barrier discharge. The focus is to investigate the unsteady plasma flow control on the rotor airfoil dynamic stall. Particularly, we aim to explore the underlying mechanism of unsteady plasma control and its sensitivity to actuation parameters. The experiments have confirmed the promising control capabilities of unsteady plasma actuation. The results indicate that the unsteady flow control can effectively mitigate the sudden drop of airfoil lift, with a 20% duty cycle being sufficient to achieve significant control effects. A comprehensive parametric study on the dimensionless actuation frequency F+ demonstrates that the optimal performance of the unsteady control occurs at F+ = 1~2. This optimal condition yields a remarkable 16% reduction in the lift hysteresis loop area and a 6% increase in the average lift coefficient. Furthermore, by comparing the airfoil aerodynamic forces and pressure contours under steady and unsteady control modes, the control mechanism of the rotor airfoil dynamic stall based on the plasma actuation is analyzed. Notably, the plasma actuation primarily acts on the dynamic stall vortex shedding, while unsteady actuation significantly weakens the adverse effects of dynamic stall vortex shedding on the airfoil aerodynamic forces. Additionally, the unsteady actuation generates more vortices, thereby enhancing the recovery of the leading-edge reverse pressure gradient and the flow reattachment.
-
0. 引 言
随着前飞速度增加,直升机旋翼桨盘前、后行侧的局部瞬态动压压差增加,导致动压不对称分布。为保持载荷平衡,必须增加后行桨叶翼剖面的迎角、减小前行桨叶翼剖面的迎角[1-2]。但是动压较小的后行区域经常处于较大的迎角状态,容易发生旋翼的动态失速现象,限制了直升机的最大飞行速度和机动能力,是直升机空气动力学领域需要持续关注的重难点问题[3]。
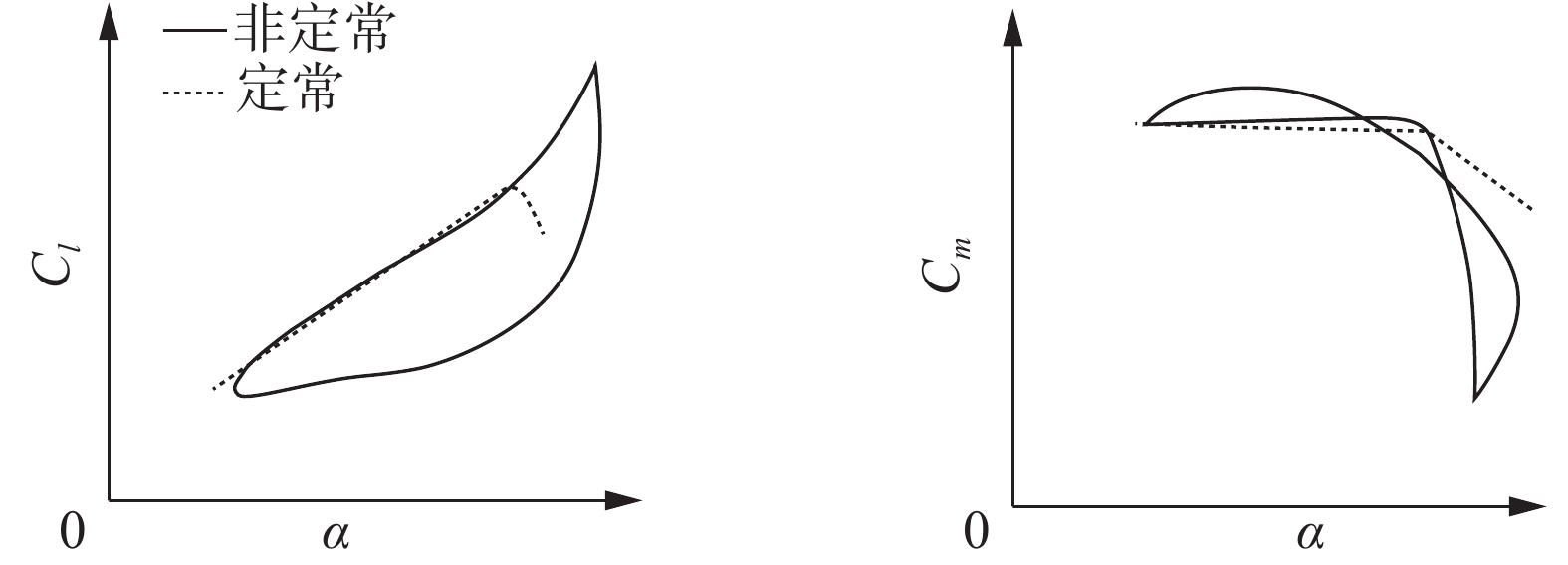
翼型动态失速过程中的气动力、力矩在上冲程和下冲程不重合,迟滞效应导致的气动力回线[4]如图1所示。可以看出,超过静态失速迎角后,升力系数仍然在增大,最大升力系数和失速迎角大大提高,但同时也带来了巨大的低头力矩,失速发生后气动力和力矩的振荡也比静态失速大得多。
![]()
动态失速还会带来严重的稳定性问题。空气负载系统的稳定性一般是通过气动阻尼系数
Ξcycle [5]来衡量,其定义如下:Ξcycle=−Cw/(πα21)=−1πα21∮Cmc/4dα (1) 其中:Cw是来流和翼型之间的标准能量传递系数,
α1 为振幅,(°),Cmc/4 为绕1/4弦长的力矩系数。力矩曲线环逆时针,Ξcycle 为正;力矩曲线环顺时针,Ξcycle 为负。典型动态失速过程中正负气动阻尼区域分布见图2。动态失速带来负的气动阻尼,会导致旋翼位移的极限环增长,严重时可导致失速颤振,进而引发毁灭性的旋翼机构失效问题[5]。![]()
根据是否向流场注入额外的能量,流动控制技术可分为两大类,被动流动控制和主动流动控制。
用于动态失速的被动流动控制技术主要有前缘变形、后缘偏转襟翼、格尼襟翼、涡流发生器等,主要通过两种途径来控制动态失速:一种是通过外形变形,使翼面压力分布发生改变[6-7];另一种是通过改变翼面流动的流态,抑制旋涡和分离流的产生和发展[7-9]。以涡流发生器为例,流体通过涡流发生器翼尖产生诱导涡引起边界层的扰动,增加翼型边界层的能量,使边界层更能承受逆压梯度。但是,涡流发生器的安装应谨慎设计,不当的安装位置和形状不仅会增加翼型阻力,也会增加翼型动态失稳和失速颤振的可能性[10]。
目前翼型动态失速主动流动控制方法主要包括吹气流动控制、合成射流流动控制、等离子体流动控制技术等。主动流动控制方式响应快、频率高,应用潜力巨大。等离子体流动控制作为一种典型的主动流动控制手段,其激励器厚度很薄,不会改变旋翼翼型的外形,而且控制系统简单,是一种十分适合旋翼翼型动态失速控制的手段。
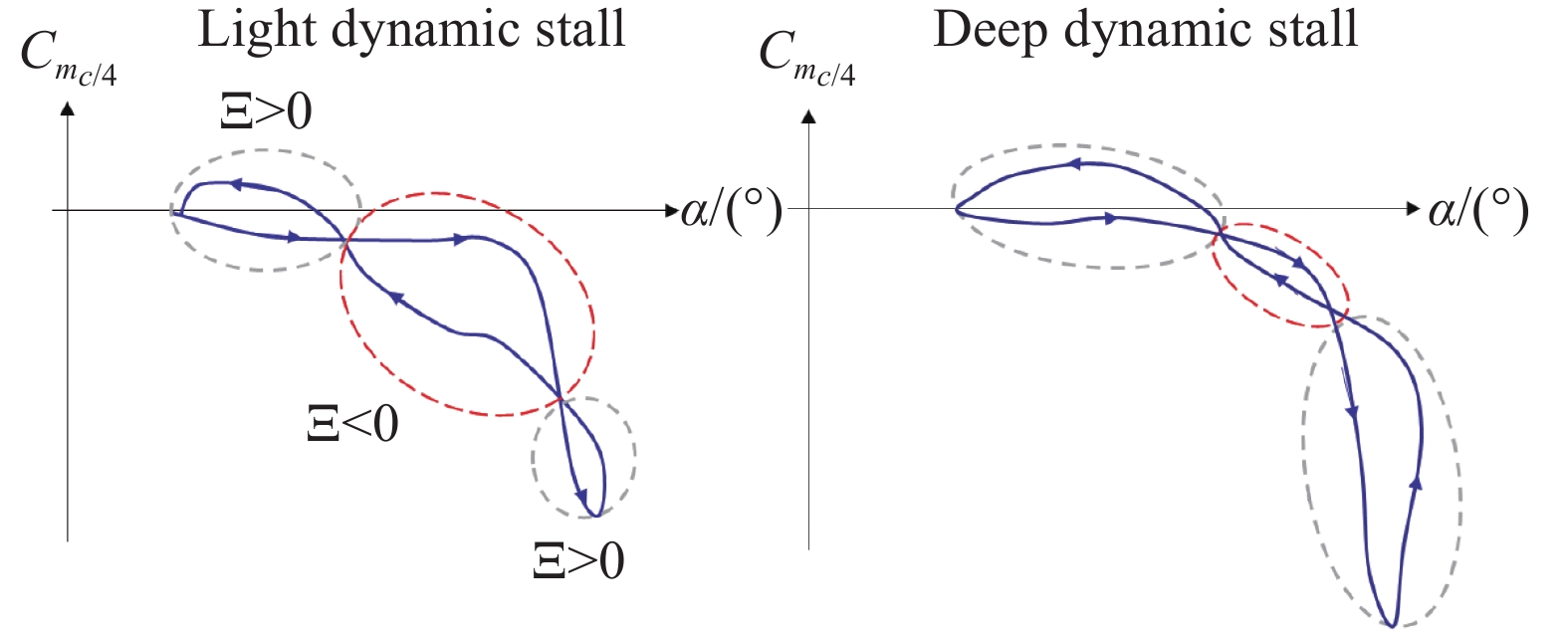
图3为目前一种常用的非对称构型的介质阻挡放电(dielectric barrier discharge, DBD)等离子体激励器示意图[11]。高频高压产生的等离子体在电场的作用下做定向运动,等离子体与附近气体碰撞,传递动量和能量,诱导气流发生运动,从而改善流场。等离子体流动控制试验表明,等离子体诱导出前缘附近的贴体翼面涡,促进分离流再附[12]。
根据激励器工作方式又可分为定常控制和非定常控制。非定常控制通过周期性的开关激励可以在保证激励效果的情况下降低功耗,非定常控制无量纲激励频率
F+ 定义为:F+=faccU∞ (2) 其中:
fac 为激励频率,c为翼型弦长,U∞ 为来流速度。关于定常激励和非定常激励的优劣,目前研究尚未达成一致结论[13]。升力改善上非定常控制有一定优势,但是俯仰稳定性上定常控制更胜一筹[5]。非定常激励能源消耗低,且可以更好地作用于复杂非定常流动中的分离流和涡结构[14],能适应更多的工况[15],是动态失速控制研究的热点。
李应红等[15-16]采用测压的方法系统地研究了NACA0015翼型静态失速时介质阻挡放电的激励电压、位置、占空比和脉冲频率对流动分离的控制效果,结果表明,在雷诺数约为5.8×105时可将失速迎角推迟3°,最大升力提升约35%。王万波等[17]采用PIV技术对NACA0015翼型静态失速介质阻挡放电的控制机理进行了研究。在非定常等离子体激励参数影响的研究中,发现10%的占空比就足以产生控制效果[18],其中无量纲激励频率F+对控制效果的影响最大[19]。有研究表明,最佳F+与迎角、雷诺数、来流速度有关[20-21],但一般在0.5~2之间[18-19,22]。相关数值研究表明,等离子体气动激励诱导出前缘附近贴体翼面“涡簇”,起到了虚拟气动外形的作用,能够改善动态失速[23]。
等离子体激励与非定常复杂流动的耦合是一个极具挑战性的问题。本文开展了等离子体控制旋翼翼型动态失速的试验,重点对非定常等离子体控制的效果和非定常参数的影响进行了研究。
1. 试验方案
1.1 风 洞
试验在中国空气动力研究与发展中心的FL-11风洞中进行。该风洞为一座低速回流式风洞,闭口试验段截面尺寸为1.8 m×1.4 m,长度为5.8 m。试验稳定风速范围10~105 m/s,风速低于70 m/s时湍流度小于0.8‰。本试验风速范围为15~30 m/s,研究控制机理时所选风速为15 m/s,对应雷诺数约为3.1×105。
1.2 模 型
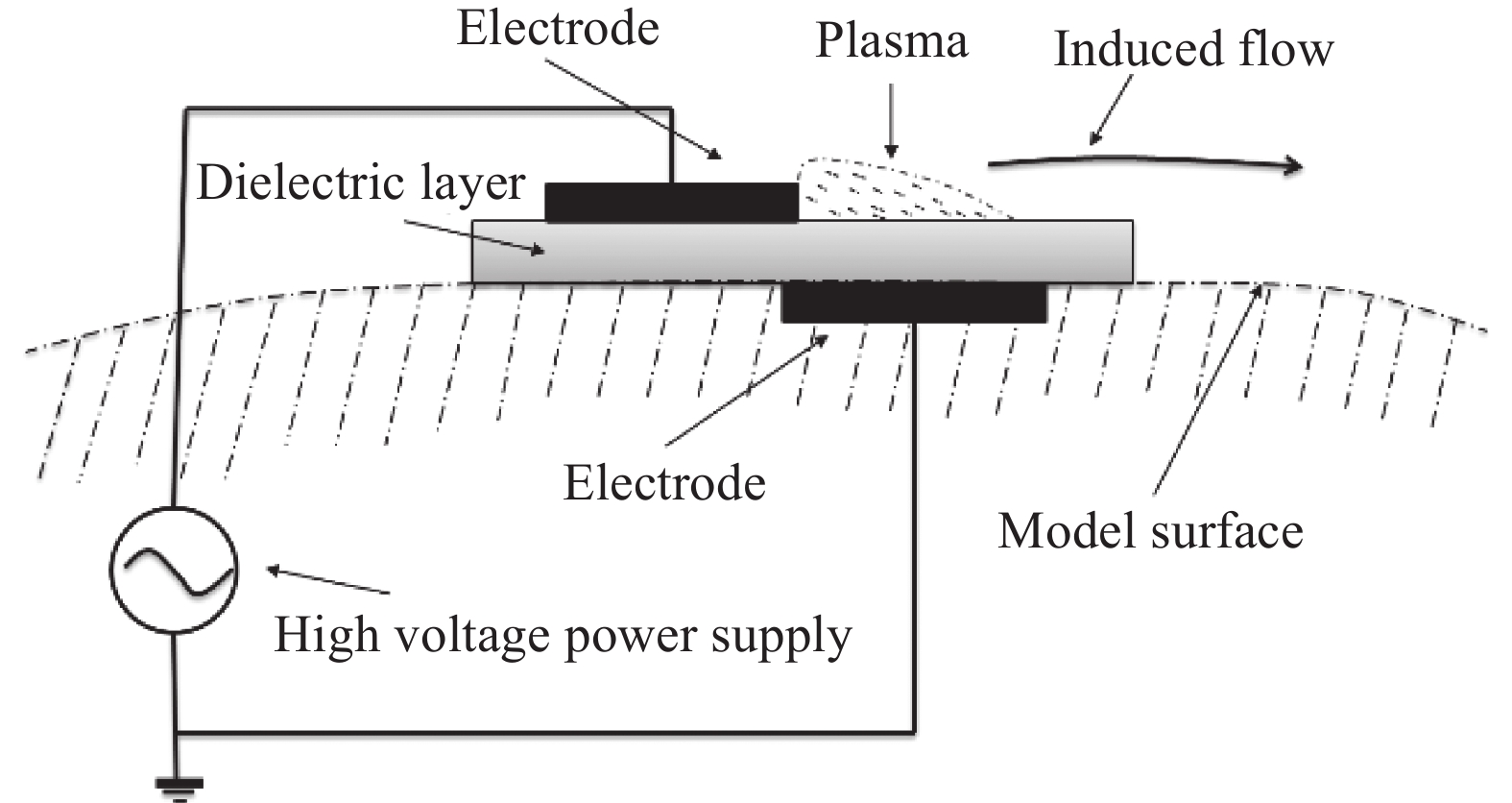
试验模型为OA212翼型,弦长300 mm,展长
1385 mm,由铝合金骨架和玻璃钢蒙皮组成,总重量为12 kg,俯仰震荡惯量为0.09 kg·m2。模型以1/4弦长位置为旋转中心,绕竖直轴进行俯仰运动。测压孔位于模型中截面,共计31个,上翼面17个(含前缘),下翼面14个,为方便布置,上下翼面与布置面夹角为20°。压力传感器与这31个测压孔相连,获取翼面压力的动态变化。在翼型展向上布置4个静态测压孔,翼型模型的测压孔布置如图4所示。
动态试验中翼型做俯仰振荡,迎角α随时间t按以下规律变化:
α=α0+α1sin(2πft) (3) 其中:
α0 为平衡迎角;f 为模型俯仰振荡频率,Hz;t 为时间,s。1.3 激励器和激励电源
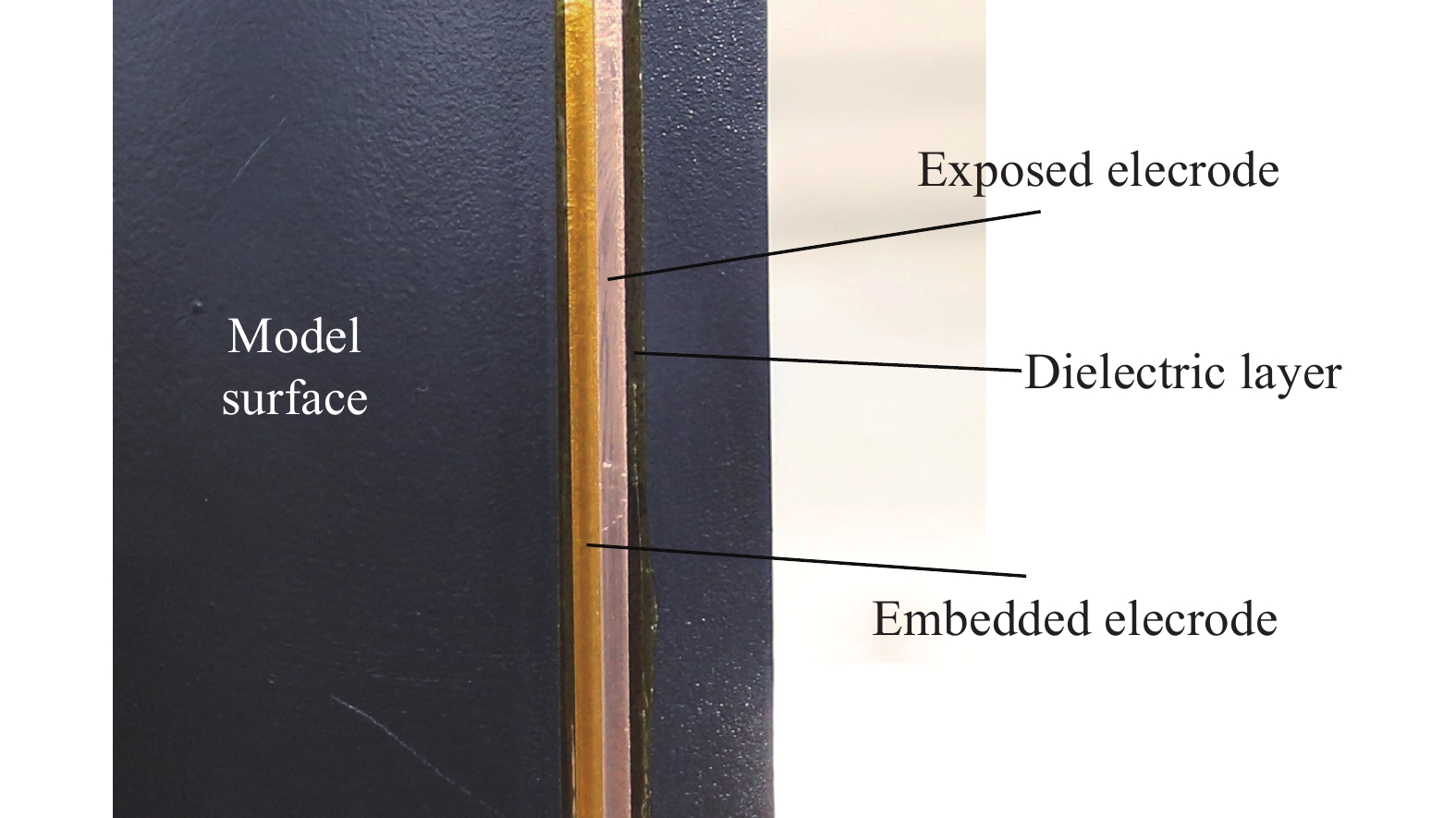
激励器采用介质阻挡放电非对称构型,如图5所示。激励电极分为上层电极与下层电极,中间由绝缘介质隔开。上下电极均为铜箔,厚度为0.05 mm,宽度为3 mm。绝缘介质为聚酰亚胺胶带,厚度为0.1 mm。为了保证激励器的厚度尽量小,在两电极之间只加入一层绝缘介质胶带,直接贴于模型表面,如图5所示。
激励电源采用自制模块化电源,由控制模块和升压模块组成,由24 V左右的航模电池供电。该电源将锂电池与驱动电路板连接,通过驱动电路板中的桥式转换器产生低电压方波。然后在6个串联变压器的作用下,通过升压电路板将低电压方波转换为高压方波,最后通过滤波的方式输出正弦波,正弦波频率即为式(2)中的激励器激励频率fac。通过脉冲宽度调制(PWM)控制输出电压的占空比和脉冲频率,其中占空比即通电时间相对于总时间的占比。
1.4 数据采集和处理
风洞来流稳定后,模型开始在风洞中做正弦俯仰运动,通过动态传感器采集32个周期的动态压力数据,每个周期等间隔采集256次。动态压力传感器为ENDEVCO 8510B-1系列压阻式动态传感器,量程为2 psi。该压力传感器测压口与翼面测压孔金属管通过一段塑料软管相连,数据线为屏蔽线,抗干扰能力较强。经试验,不加防护条件下,DBD等离子体产生时会对压力传感器产生明显影响,导致无法获取压力数据,通过在传感器上缠绕绝缘胶带后再固定于模型内部,干扰消失。分析其原因主要是强电磁干扰会在翼型模型金属件上产生感应电流,并通过传感器金属壳体导入传感器内部,导致压力测量失败。
由于动态失速过程中的非定常性十分强烈,尤其在下俯阶段气动力波动十分剧烈且不重复,为了方便分析动态失速一个周期内的气动力变化规律,对时域信号进行多点平均处理,将32个周期数据按照相位对应进行平均后生成1个周期的数据。
在非定常激励研究试验中,为了获得更好的激励效果,激励器上下电极间电压峰峰值为
8000 V。在翼型俯仰运动过程中,通过开启、关闭激励电源,分别获取控制前后翼面的动态压力变化,并通过压力积分得到了控制前后动态失速过程中的升力系数和力矩系数。2. 试验结果分析
2.1 占空比影响研究
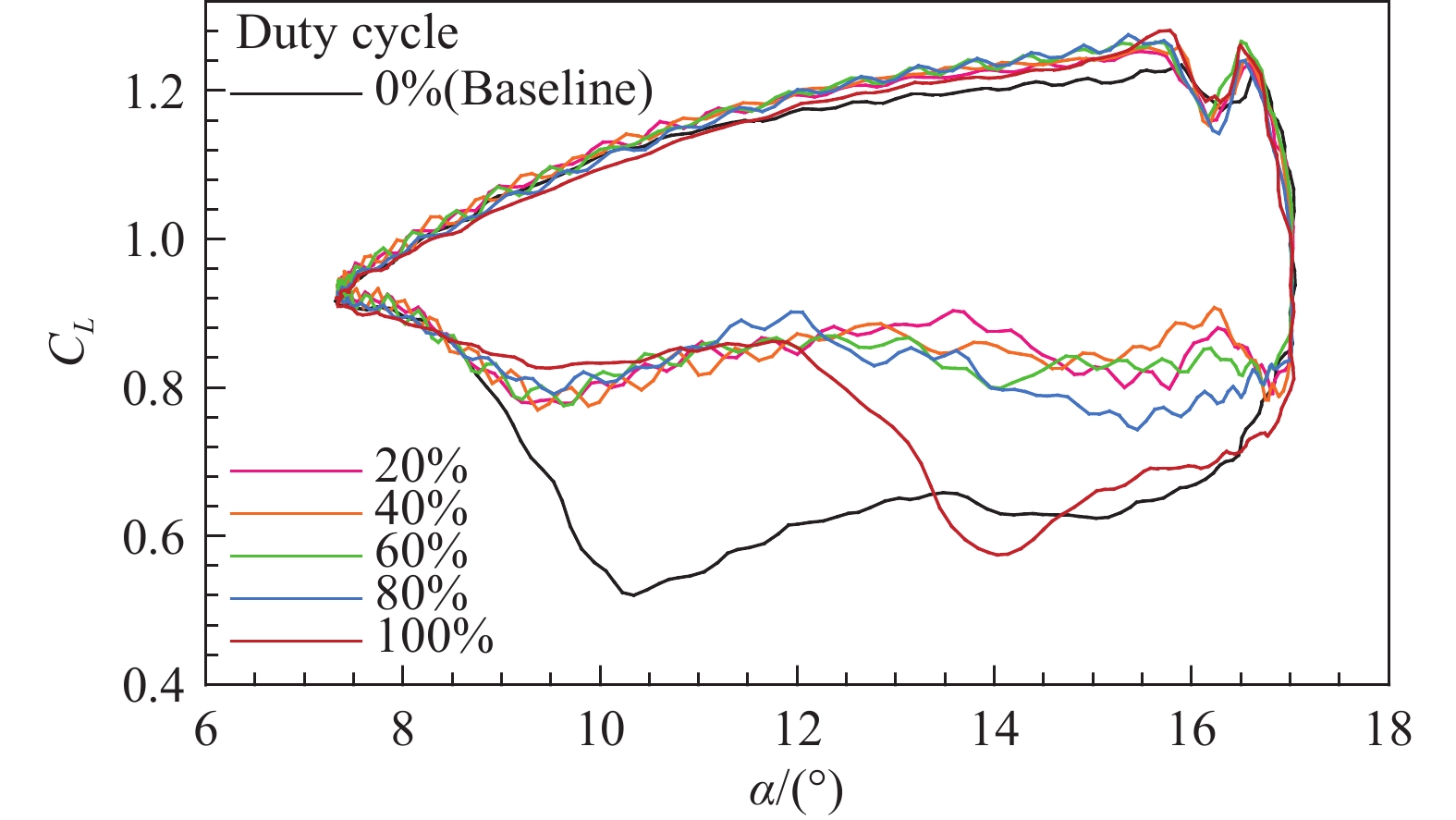
在翼型上翼面前缘2%c位置施加控制,激励频率为50 Hz,对应F+为1,改变电源输出的占空比,施加控制前后的升力和力矩对比见图6和图7,其中0%为基准线,表示无控制状态,100%表示定常控制,即持续控制状态。可以看出,仅仅20%占空比的非定常激励即可取得明显的控制效果,而且随着占空比的增大(50%以上时),控制效果反而有所下降。非定常激励施加后气动力和力矩小幅波动明显,意味着增加了流场的非定常波动,但占空比大于50%后,这种非定常的扰动会减弱,因此造成控制效果的下降。对比升力曲线,非定常控制效果要优于定常控制,非定常激励施加后明显减小了动态失速引起的升力骤降幅度,而且对升力迟滞环面积的减小作用也更明显。
![]() 图 6 不同占空比控制下升力系数对比Figure 6. Comparison of CL variations with different duty cycles of unsteady control
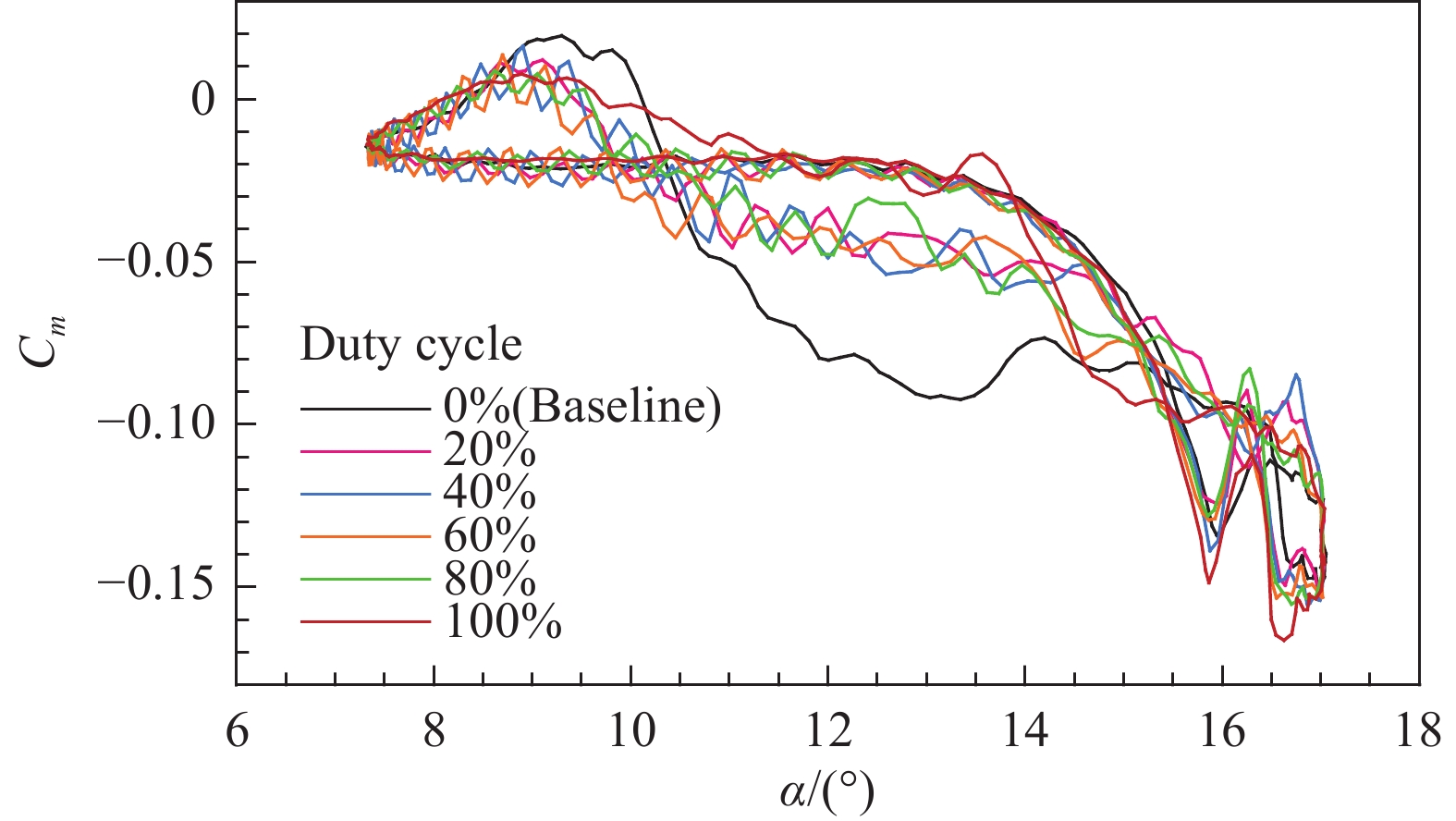
图 6 不同占空比控制下升力系数对比Figure 6. Comparison of CL variations with different duty cycles of unsteady control![]() 图 7 不同占空比控制下力矩系数对比Figure 7. Comparison of Cm variations with different duty cycles of unsteady control
图 7 不同占空比控制下力矩系数对比Figure 7. Comparison of Cm variations with different duty cycles of unsteady control为了定量对比控制效果,对以下3个量进行了对比:一是升力迟滞环面积变化
ΔSCL,hysteresis,loop ,代表施加控制后升力迟滞的改变幅度;二是顺时针力矩曲线环面积变化ΔSCm,Ξ<0 ,代表施加控制后负气动阻尼的改变幅度;三是平均升力系数变化ΔCL,avg ,代表整个过程中升力的改变。对比结果见表1。在动态升力特性上,非定常等离子体流动控制明显优于定常等离子体流动控制,占空比小于50%时效果更好。在动态力矩的改善上,非定常激励和定常激励都减小了负的气动阻尼,但定常激励改善幅度更大。表 1 不同占空比控制效果对比Table 1. Comparison of control performance with different duty cycles占空比/% ΔSCL,hysteresis,loop/% ΔSCm,Ξ<0/% ΔCL,avg/% 20 –34.1 –67.0 +7.4 40 –34.1 –66.2 +7.5 60 –31.6 –57.8 +7.4 80 –30.6 –63.4 +6.1 100 –19.4 –84.9 +2.9 2.2 激励频率影响研究
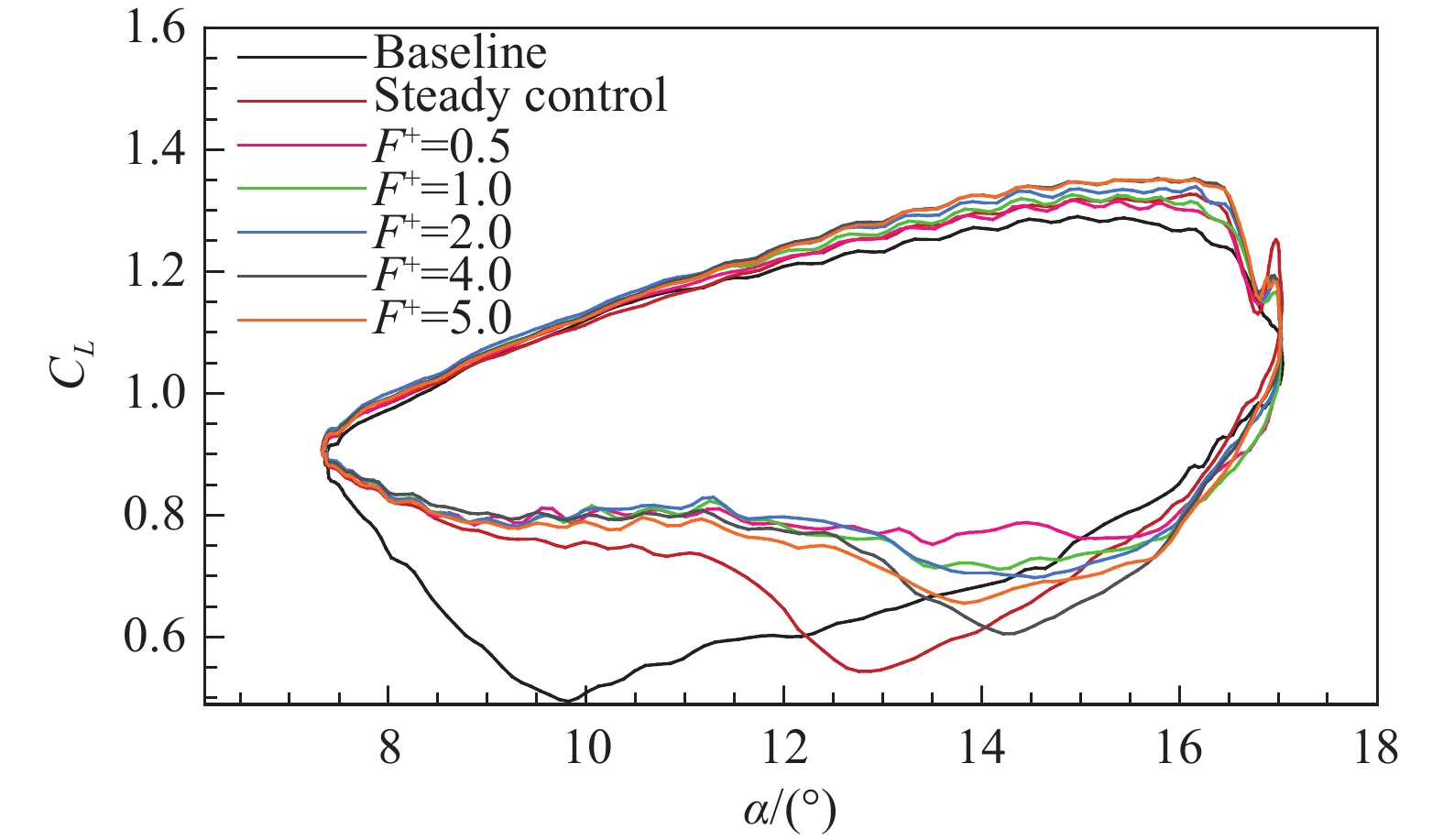
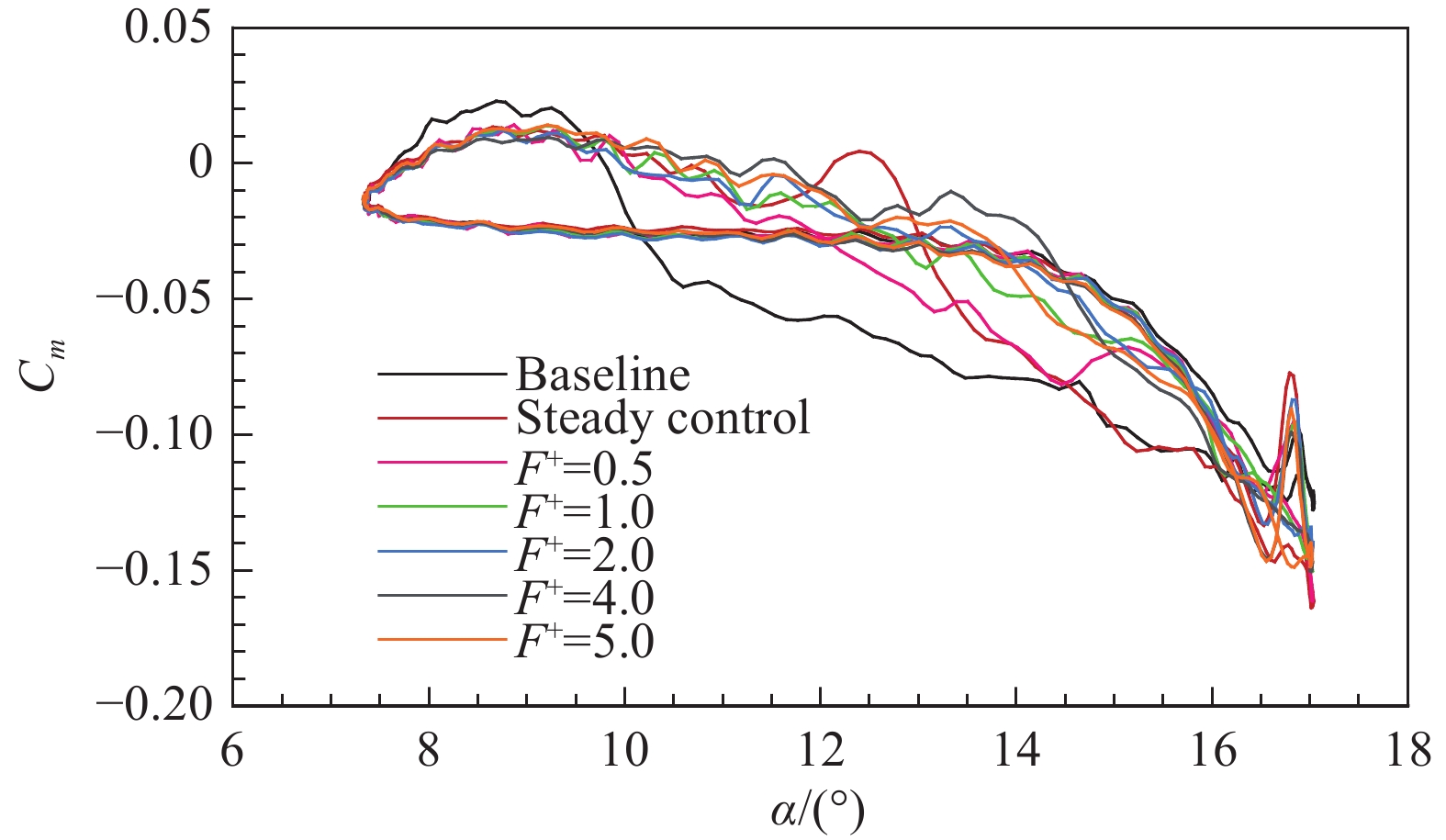
为了进一步研究非定常等离子体控制激励频率影响,在占空比为40%的条件下,进行了试验研究。不同激励频率下的升力系数和力矩系数见图8和图9。不同于表1结果,在本节试验工况下,非定常激励对负气动阻尼减小的效果强于定常激励。由此可见,合适参数的非定常激励可以比定常激励达到更佳的控制效果。试验控制效果定量对比见表2。对比可以得出,该工况下无论是升力迟滞环面积的减小幅度,还是升力平均值的增大程度,抑或是负的气动阻尼的减小幅度,非定常激励都要强于定常激励。不同F+下的控制效果对比可以看出,F+越小,升力迟滞环面积越小。当F+ = 0.5时,升力迟滞环面积最小,但负的气动阻尼最大。综合来看,F+ = 1.0~2.0时,控制效果较好,升力迟滞环面积减小16%左右,升力系数平均值提高6%左右,最低升力系数从未加控制的0.5提高到0.7以上,同时负的气动阻尼明显减小,系统稳定性提高。
![]() 图 8 不同F+下升力系数对比(占空比40%)Figure 8. Comparison of CL under different F+ of unsteady control (duty cycle 40%)
图 8 不同F+下升力系数对比(占空比40%)Figure 8. Comparison of CL under different F+ of unsteady control (duty cycle 40%)![]() 图 9 不同F+下力矩系数对比(占空比40%)Figure 9. Comparison of Cm under different F+ of unsteady control (duty cycle 40%)表 2 不同F+控制效果对比Table 2. Comparison of control performance with different F+
图 9 不同F+下力矩系数对比(占空比40%)Figure 9. Comparison of Cm under different F+ of unsteady control (duty cycle 40%)表 2 不同F+控制效果对比Table 2. Comparison of control performance with different F+F+ ΔSCL,hysteresis,loop/% ΔSCm,Ξ<0/% ΔCL,avg/% 0.5 –21.2 –59.2 +5.7 1.0 –17.0 –81.7 +5.5 2.0 –15.5 –88.7 +6.3 4.0 –10.3 –88.7 +5.7 5.0 –10.6 –83.9 +5.4 Steady –7.0 –43.1 +3.9 2.3 非定常控制机理研究
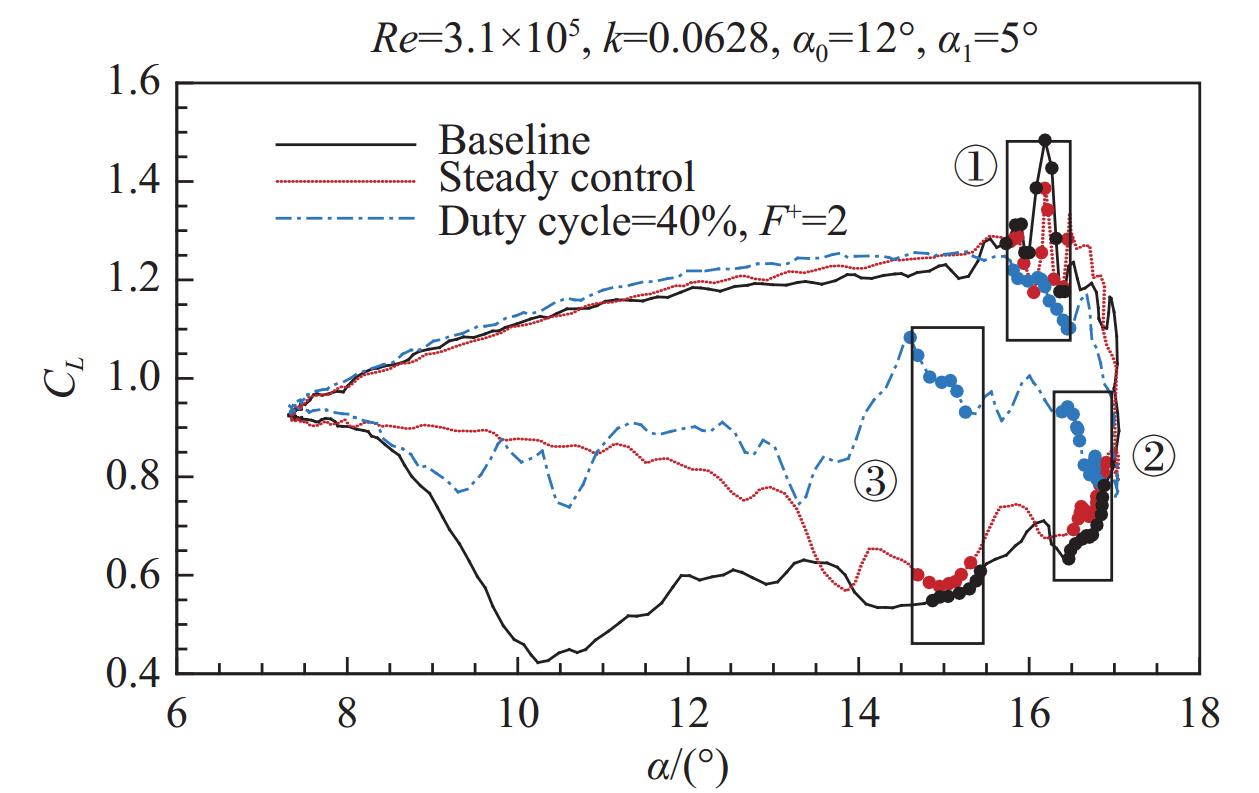
在前文的对比中发现非定常等离子体流动控制在某些工况下能取得更加明显的控制效果,为了深入了解其中的原因,选取一组试验进行对比。首先,引入减缩频率k,作为翼型动态失速中重要的无量纲数,其表征流动的非定常特征。在翼型俯仰振荡中k的定义为
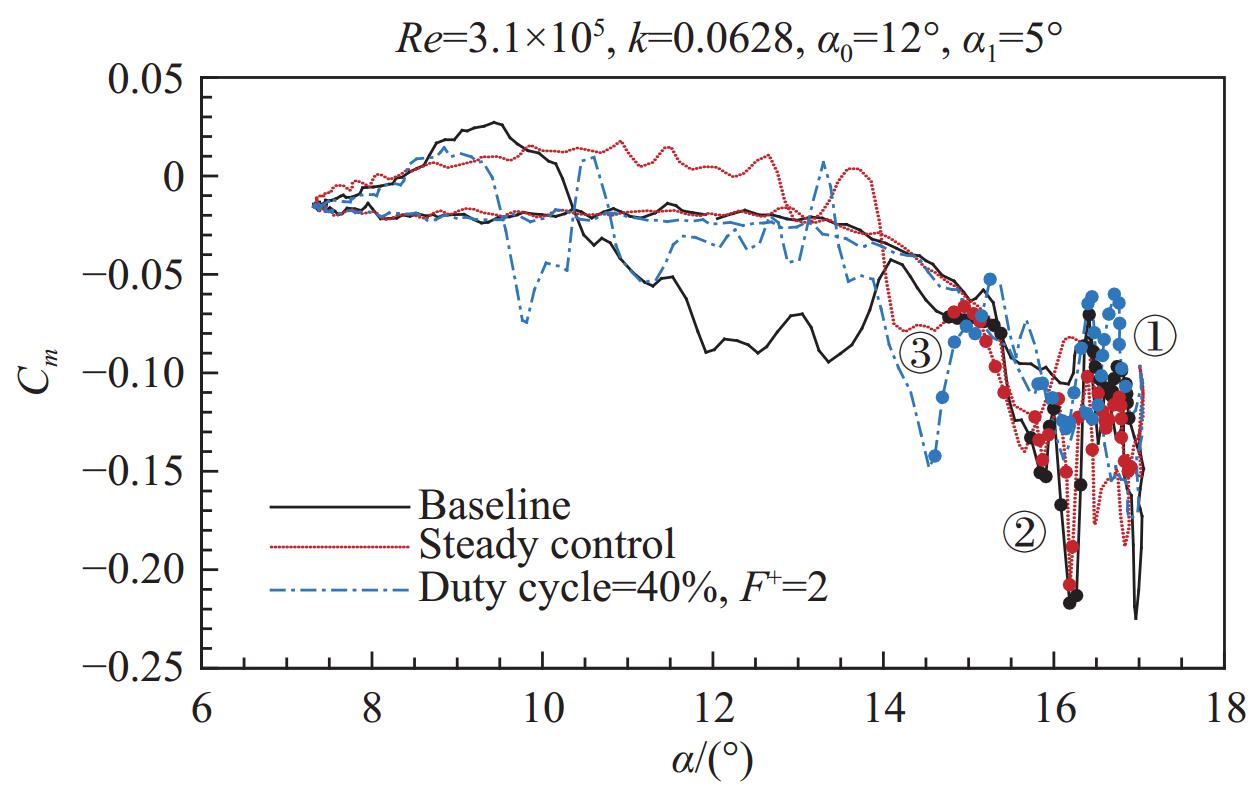
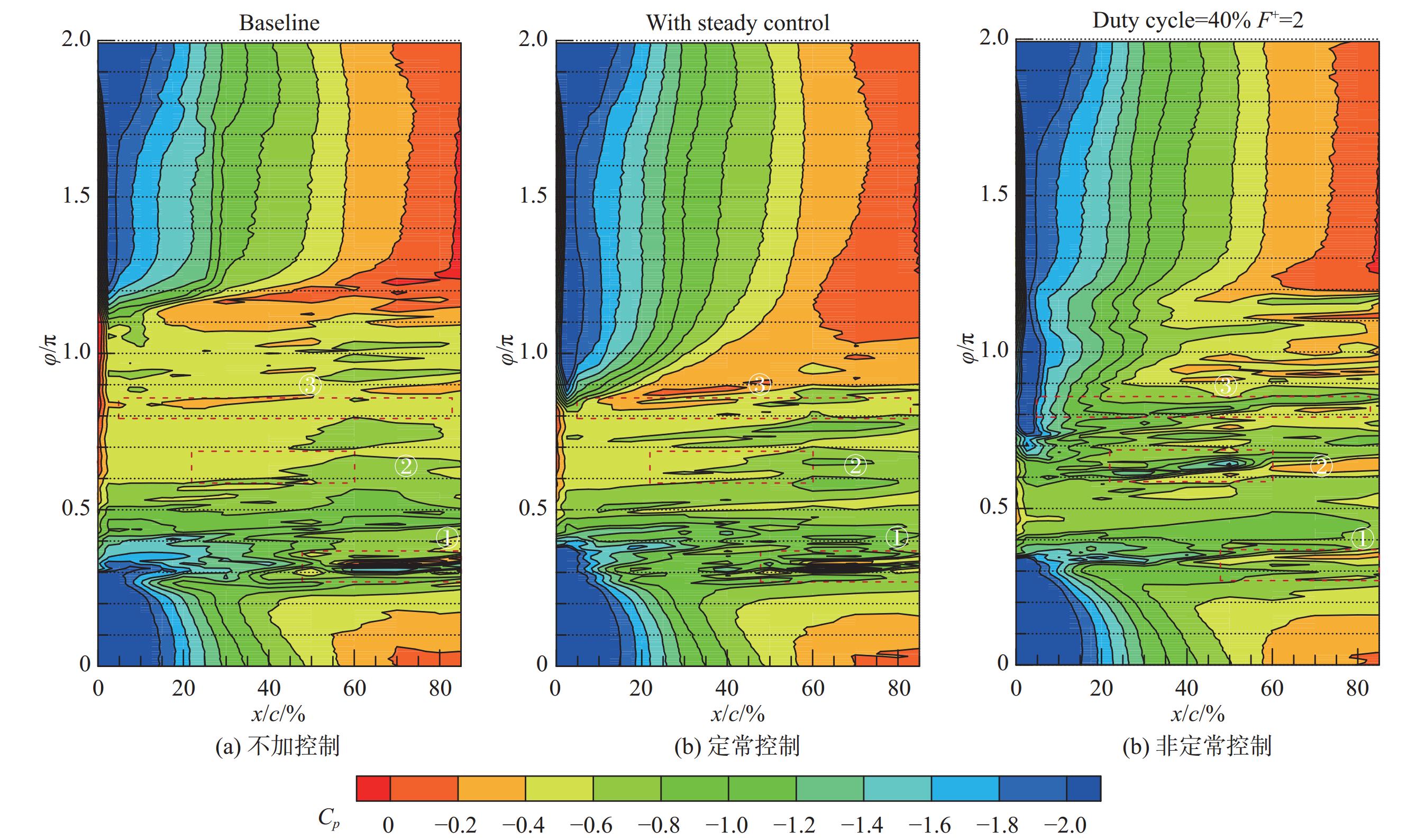
k=πfc/U∞ ,其中U∞为来流速度。Re =310000 ,k =0.0628 ,α0 = 12°,α1 = 5°,3个状态分别为无控制、施加定常控制、施加非定常控制,激励器位置为2%c处,占空比为40%,F+ = 2。为了更准确地获得翼面压力分布动态特性,不对压力数据进行平均处理,分析实时的压力和气动力变化。图10、图11为这3个状态具有代表性的1个周期的气动力系数对比。以翼型弦长为横坐标,相位φ =2πft为纵坐标,制作二维压力云图,显示出翼面上压力分布随着翼型俯仰的动态变化。图12为不加控制、加定常控制和非定常控制的二维压力云图对比。![]() 图 12 无控制、定常控制和非定常控制下的翼型表面二维压力云图Figure 12. Pressure coefficent contours on the airfoil model surface under different control conditions
图 12 无控制、定常控制和非定常控制下的翼型表面二维压力云图Figure 12. Pressure coefficent contours on the airfoil model surface under different control conditions从气动力曲线可以看出,施加定常控制后,虽然升力迟滞环面积有所减小,但是升力骤降幅度仍然很大,发生动态失速后升力系数的下跌幅度仍然超过50%。而施加非定常控制后,最低升力系数提高到0.8左右,同时升力迟滞环面积大大减小。力矩方面,施加定常控制对于低头力矩峰值的控制效果不明显,而施加非定常控制后,低头力矩峰值明显降低。
从图12可以看出,区域①存在一处负压/正压转换区,这里代表了前缘动态失速涡脱落后,沿着翼面向后运动,在经过60%c位置时,翼面产生明显的负压区。结合图10和图11可知,动态失速涡作用在上翼面后半部分会使升力增加,同时产生较大的低头力矩,随着动态失速涡从后缘脱落,诱导产生的旋转方向相反的后缘涡开始作用在翼面上产生正压区,使升力开始明显下降,同时低头力矩降低。对比可以看出,施加定常激励后,前缘动态失速涡和后缘涡的作用效果都有所减弱,但未能明显改善此处升力和力矩的振荡。
从图12(a)可以看到,未施加控制状态在重附着之前并没有观察到涡脱落的痕迹。图12(b)的定常控制状态中,在②和③之间可以看到涡脱落的痕迹,说明施加定常激励后,等离子体扰动产生的涡带动了分离区的气体,促进了前缘逆压梯度的恢复和重附着。而从图12(c)可以看出,施加非定常激励后,动态失速涡和诱导产生的后缘涡对翼面的影响大大降低,因此升力和力矩的振荡明显改善。在①处动态失速涡脱落后,上翼面处于分离状态,②和③处存在涡脱落的痕迹。在上翼面发生流动分离后,非定常等离子体产生的扰动对分离区的作用更明显,持续产生涡并向后缘运动,使分离区的气体加速,使上翼面的负压值增大,提高了升力,同时促进了前缘逆压梯度的恢复。在③处由于非定常等离子体产生的涡作用在上翼面中后部,会产生较大的低头力矩。通过以上机理分析发现,等离子体激励主要作用于动态失速涡脱落后;同时,非定常激励明显降低了动态失速涡脱落对气动力的影响,相较于定常激励,可以产生更多的涡促进前缘逆压梯度的恢复和流动的重附着。
3. 结 论
本文开展了旋翼翼型动态失速非定常等离子体流动控制试验,通过对比不同占空比和F+下的控制效果,以及控制前后的翼面压力系数分布,得出如下主要结论:
1) 非定常控制在占空比20%时即可取得明显的控制效果,可以减弱升力骤降,但某些条件下相比定常激励会带来更多的负气动阻尼。
2) 本文试验工况下,F+ = 1.0~2.0时综合控制效果最好。升力迟滞环面积减小16%左右,代表负的气动阻尼的顺时针力矩环面积减少80%以上,升力系数平均值提高6%左右,最低升力系数提高40%以上。
3) 定常激励和非定常激励都能明显促进前缘逆压梯度的恢复,但非定常激励控制效果更好。
-
![]()
![]()
![]()
图 6 不同占空比控制下升力系数对比
Figure 6. Comparison of CL variations with different duty cycles of unsteady control
![]()
图 7 不同占空比控制下力矩系数对比
Figure 7. Comparison of Cm variations with different duty cycles of unsteady control
![]()
图 8 不同F+下升力系数对比(占空比40%)
Figure 8. Comparison of CL under different F+ of unsteady control (duty cycle 40%)
![]()
图 9 不同F+下力矩系数对比(占空比40%)
Figure 9. Comparison of Cm under different F+ of unsteady control (duty cycle 40%)
![]()
图 12 无控制、定常控制和非定常控制下的翼型表面二维压力云图
Figure 12. Pressure coefficent contours on the airfoil model surface under different control conditions
表 1 不同占空比控制效果对比
Table 1 Comparison of control performance with different duty cycles
占空比/% ΔSCL,hysteresis,loop/% ΔSCm,Ξ<0/% ΔCL,avg/% 20 –34.1 –67.0 +7.4 40 –34.1 –66.2 +7.5 60 –31.6 –57.8 +7.4 80 –30.6 –63.4 +6.1 100 –19.4 –84.9 +2.9 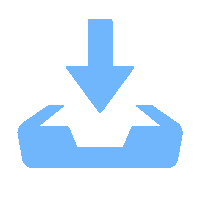 下载: 导出CSV
下载: 导出CSV
表 2 不同F+控制效果对比
Table 2 Comparison of control performance with different F+
F+ ΔSCL,hysteresis,loop/% ΔSCm,Ξ<0/% ΔCL,avg/% 0.5 –21.2 –59.2 +5.7 1.0 –17.0 –81.7 +5.5 2.0 –15.5 –88.7 +6.3 4.0 –10.3 –88.7 +5.7 5.0 –10.6 –83.9 +5.4 Steady –7.0 –43.1 +3.9
下载: 导出CSV
-
[1] 王适存. 直升机空气动力学[M]. 南京: 南京航空航天大学, 1985: 57-68. [2] MCCROSKEY W J. The phenomenon of dynamic stall[R]. National Aeronuatics and Space Administration Moffett Field, CA, Ames Research Center, NASA-TM-81264 , 1981.
[3] 招启军, 井思梦, 赵国庆, 等 . 旋翼翼型动态失速机理及非定常设计研究进展[J]. 空气动力学学报,2021 ,39 (6 ):70 −84 . doi: 10.7638/kqdlxxb-2021.0261ZHAO Q J, JING S M, ZHAO G Q, et al . Review of research progress on dynamic stall mechanism and unsteady design of rotor airfoils[J]. Acta Aerodynamica Sinica,2021 ,39 (6 ):70 −84 (in Chinese). doi: 10.7638/kqdlxxb-2021.0261[4] 胡少华, 魏斌斌 . 俯仰振荡翼型高雷诺数气动迟滞实验研究[J]. 实验技术与管理,2023 ,40 (5 ):100 −104,115 . doi: 10.16791/j.cnki.sjg.2023.05.016HU S H, WEI B B . Experimental study on aerodynamic hysteresis of pitching airfoil under high Reynolds number[J]. Experimental Technology and Management,2023 ,40 (5 ):100 −104,115 (in Chinese). doi: 10.16791/j.cnki.sjg.2023.05.016[5] CORKE T C, THOMAS F O . Dynamic stall in pitching airfoils: Aerodynamic damping and compressibility effects[J]. Annual Review of Fluid Mechanics,2015 ,47 :479 −505 . doi: 10.1146/annurev-fluid-010814-013632[6] HEINE B, MULLENERS K, JOUBERT G, et al . Dynamic stall control by passive disturbance generators[J]. AIAA Journal,2013 ,51 (9 ):2086 −2097 . doi: 10.2514/1.j051525[7] LEE B S, YE K, JOO W, et al. Passive control of dynamic stall via nose droop with gurney flap[C]//43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada. Reston, Virigina: AIAA, 2005.
[8] GERONTAKOS P, LEE T . Dynamic stall flow control via a trailing-edge flap[J]. AIAA Journal,2006 ,44 (3 ):469 −480 . doi: 10.2514/1.17263[9] GERONTAKOS P, LEE T . PIV study of flow around unsteady airfoil with dynamic trailing-edge flap deflection[J]. Experiments in Fluids,2008 ,45 (6 ):955 −972 . doi: 10.1007/s00348-008-0514-4[10] 李爽. 风力机翼型动态失速的模型及流动控制机制研究[D]. 北京: 中国科学院大学, 2021. [11] VO H D. Control of rotating stall in axial compressors using plasma actuators[C]// 37th AIAA Fluid Dynamics Conference and Exhibit, Miami, Florida. Reston, Virginia: AIAA, 2007: 3845.
[12] 李国强, 常智强, 张鑫, 等 . 翼型动态失速等离子体流动控制试验[J]. 航空学报,2018 ,39 (8 ):122111 .LI G Q, CHANG Z Q, ZHANG X, et al . Experiment on flow control of airfoil dynamic stall using plasma actuator[J]. Acta Aeronautica et Astronautica Sinica,2018 ,39 (8 ):122111 (in Chinese).[13] MUKHERJEE S, ROY S. Enhancement of lift and drag characteristics of an oscillating airfoil in deep dynamic stall using plasma actuation[C]//50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, Tennessee. Reston, Virigina: AIAA, 2012.
[14] 吴云, 李应红 . 等离子体流动控制研究进展与展望[J]. 航空学报,2015 ,36 (2 ):381 −405 .WU Y, LI Y H . Progress and outlook of plasma flow control[J]. Acta Aeronautica et Astronautica Sinica,2015 ,36 (2 ):381 −405 (in Chinese).[15] 李应红, 梁华, 马清源, 等 . 脉冲等离子体气动激励抑制翼型吸力面流动分离的实验[J]. 航空学报,2008 ,29 (6 ):1429 −1435 . doi: 10.3321/j.issn:1000-6893.2008.06.004LI Y H, LIANG H, MA Q Y, et al . Experimental investigation on airfoil suction side flow separation by pulse plasma aerodynamic actuation[J]. Acta Aeronautica et Astronautica Sinica,2008 ,29 (6 ):1429 −1435 (in Chinese). doi: 10.3321/j.issn:1000-6893.2008.06.004[16] 李应红, 吴云, 张朴, 等 . 等离子体激励抑制翼型失速分离的实验研究[J]. 空气动力学学报,2008 ,26 (3 ):372 −377 . doi: 10.3969/j.issn.0258-1825.2008.03.018LI Y H, WU Y, ZHANG P, et al . Experimental investigation on airfoil stall separation suppression by plasma actuation[J]. Acta Aerodynamica Sinica,2008 ,26 (3 ):372 −377 (in Chinese). doi: 10.3969/j.issn.0258-1825.2008.03.018[17] 王万波, 黄勇, 黄宗波, 等 . 介质阻挡放电等离子体对NACA0015翼型流动控制的PIV实验研究[J]. 实验流体力学,2012 ,26 (2 ):1 −5 . doi: 10.3969/j.issn.1672-9897.2012.02.001WANG W B, HUANG Y, HUANG Z B, et al . PIV measurement of dielectric barrier discharge plasma flow control on NACA0015 airfoil[J]. Journal of Experiments in Fluid Mechanics,2012 ,26 (2 ):1 −5 (in Chinese). doi: 10.3969/j.issn.1672-9897.2012.02.001[18] POST M, CORKE T. Separation control using plasma actuators: Dynamic stall control on an oscillating airfoil[C]//2nd AIAA Flow Control Conference, Portland, Oregon. Reston, Virigina: AIAA, 2004: 1039-46.
[19] MITSUO K, WATANABE S, ATOBE T, et al. Lift enhancement of a pitching airfoil in dynamic stall by DBD plasma actuators[C]//51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Grapevine (Dallas/Ft. Worth Region), Texas. Reston, Virigina: AIAA, 2013.
[20] FRANKHOUSER M W, GREGORY J W. Nanosecond dielectric barrier discharge plasma actuator flow control of compressible dynamic stall[C]//46th AIAA Plasmadynamics and Lasers Conference, Dallas, TX. Reston, Virginia: AIAA, 2015.
[21] GREENBLATT D, BEN-HARAV A, SCHULMAN M. Dynamic stall control on a vertical axis wind turbine using plasma actuators[C]//50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, Tennessee. Reston, Virigina: AIAA, 2012.
[22] WEAVER D, MCALISTER K W, TSO J . Control of VR-7 dynamic stall by strong steady blowing[J]. Journal of Aircraft,2004 ,41 (6 ):1404 −1413 . doi: 10.2514/1.4413[23] 张卫国, 史喆羽, 李国强, 等 . 风力机翼型动态失速等离子体流动控制数值研究[J]. 力学学报,2020 ,52 (6 ):1678 −1689 doi: 10.6052/0459-1879-20-090ZHANG W G, SHI Z Y, LI G Q, et al . Numerical study on dynamic stall flow control for wind turbine airfoil using plasma actuator[J]. Chinese Journal of Theoretical and Applied Mechanics,2020 ,52 (6 ):1678 −1689 (in Chinese). doi: 10.6052/0459-1879-20-090 -
期刊类型引用(0)
其他类型引用(1)

















计量
- 文章访问数: 60
- HTML全文浏览量: 12
- PDF下载量: 21
- 被引次数: 1
